.jpg)
.jpg)
.jpg)
.jpg)
Nema 11 (28 mm) hübriid-sammmootor, bipolaarne, 4-klemmiline, ACME kruvikeermega, madal müratase, pikk eluiga, kõrge jõudlus.
Nema 11 (28 mm) hübriid-sammmootor, bipolaarne, 4-klemmiline, ACME kruvikeermega, madal müratase, pikk eluiga, kõrge jõudlus.
See 28 mm hübriid-samm-mootor on saadaval kolmes tüübis: väliselt juhitav, läbiva teljega ja läbiva fikseeritud teljega. Saate valida vastavalt oma konkreetsetele vajadustele.
Maksimaalne tõukejõud kuni 240 kg, madal temperatuuri tõus, madal vibratsioon, madal müratase, pikk eluiga (kuni 5 miljonit tsüklit) ja kõrge positsioneerimistäpsus (kuni ±0,01 mm)
VSM28HSM standardse välise mootori kontuurjoonis:
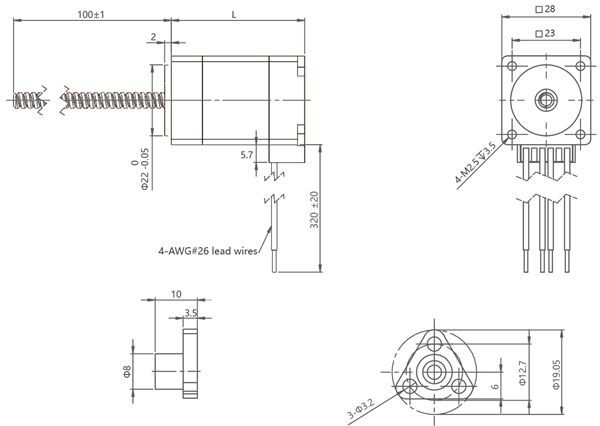
Märkused:
Pliikruvi pikkust saab kohandada
Pliikruvi otsas on kohandatud töötlemine teostatav
Kirjeldused
| Toote nimi | 20 mm väliselt juhitavad hübriidsed samm-mootorid |
| Mudel | VSM20HSM |
| Tüüp | hübriidsed samm-mootorid |
| Astme nurk | 1,8° |
| Pinge (V) | 2,5 / 6,3 |
| Voolutugevus (A) | 0,5 |
| Takistus (oomides) | 5,1 / 12,5 |
| Induktiivsus (mH) | 1,5 / 4,5 |
| Pliijuhtmed | 4 |
| Pöördemoment (Nm) | 0,02 / 0,04 |
| Mootori pikkus (mm) | 30 / 42 |
| Ümbritseva õhu temperatuur | -20 ℃ ~ +50 ℃ |
| Temperatuuri tõus | Maksimaalselt 80 000 |
| Dielektriline tugevus | 1 mA maks. @ 500 V, 1 kHz, 1 sekund. |
| Isolatsioonitakistus | 100 MΩ min @500 Vdc |
Sertifikaadid

Elektrilised parameetrid:
| Mootori suurus | Pinge/ Faas (V) | Praegune/ Faas (A) | Vastupanu/ Faas (Ω) | Induktiivsus/ Faas (mH) | Arv Pliijuhtmed | Rootori inerts (g.cm2) | Hoidmismoment (Nm) | Mootori pikkus L (mm) |
| 20 | 2.5 | 0,5 | 5.1 | 1.5 | 4 | 2 | 0,02 | 30 |
| 20 | 6.3 | 0,5 | 12.5 | 4.5 | 4 | 3 | 0,04 | 42 |
Üldised tehnilised parameetrid:
| Radiaalne kliirens | Maksimaalselt 0,02 mm (450 g koormus) | Isolatsioonitakistus | 100MΩ @500V alalisvoolu |
| Aksiaalne kliirens | Maksimaalselt 0,08 mm (450 g koormus) | Dielektriline tugevus | 500 V vahelduvvool, 1 mA, 1 s 1 kHz juures |
| Maksimaalne radiaalne koormus | 15N (20 mm ääriku pinnast) | Isolatsiooniklass | B-klass (80 000 km) |
| Maksimaalne aksiaalne koormus | 5N | Ümbritseva õhu temperatuur | -20 ℃ ~ +50 ℃ |
Kruvide spetsifikatsioonid:
| Pliikruvi läbimõõt (mm) | Plii (mm) | Samm (mm) | Iselukustuv jõud väljalülitamisel (N) |
| 3.5 | 0,6096 | 0,003048 | 80 |
| 3.5 | 1 | 0,005 | 40 |
| 3.5 | 2 | 0,01 | 10 |
| 3.5 | 4 | 0,02 | 1 |
| 3.5 | 8 | 0,04 | 0 |
Pöördemomendi-sageduse kõver
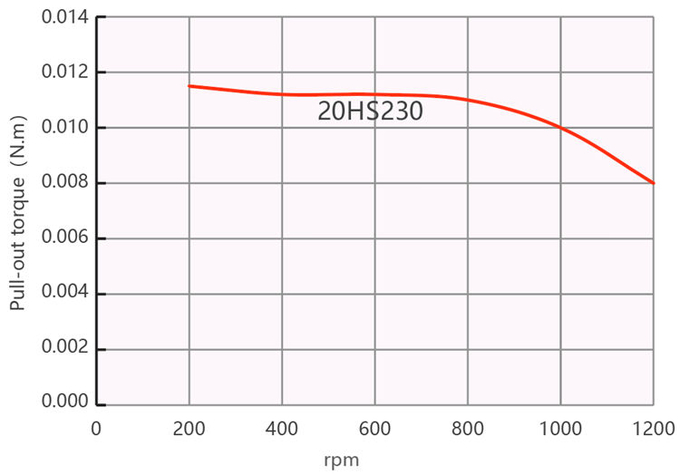
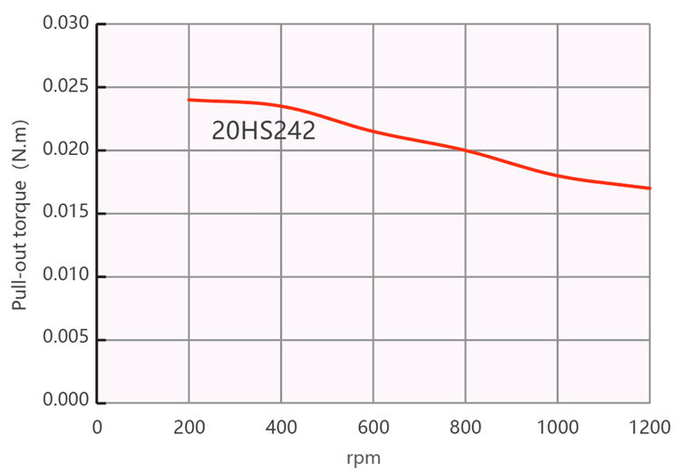
Testitingimus:
Katkestaja ajam, poolmikrosammuline, ajami pinge 24V
Rakendusvaldkonnad
3D-printimine:20 mm hübriidseid astmemootoreid saab kasutada 3D-printerite liikumise juhtimiseks prindipea, tööpinna ja aksiaalse liikumissüsteemi juhtimiseks.
Automaatikaseadmed: Neid astmelisi mootoreid kasutatakse tavaliselt automatiseerimisseadmetes, näiteks automaatsetes pakkimismasinates, automaatsetes montaažiliinides, automaatsetes käsitsemisrobotites jne, täpse asukoha ja kiiruse juhtimiseks.
Robootika:Robootika valdkonnas kasutatakse robotite liigeste liikumise juhtimiseks täpse asendi ja positsiooni juhtimiseks 20 mm hübriid-samm-mootoreid.
CNC-tööpingid:Neid astmelisi mootoreid kasutatakse ka CNC-tööpinkides tööriistade või laudade täpsete liikumiste juhtimiseks suure täpsusega töötlemiseks.
Meditsiiniseadmed:Meditsiiniseadmetes saab 20 mm hübriid-samm-mootoreid kasutada meditsiiniseadmete komponentide, näiteks kirurgiliste robotite ja ravimite manustamissüsteemide liikumise täpseks juhtimiseks.
Autovarustus:Autotööstuses saab neid astmelisi mootoreid kasutada autokomponentide, näiteks akende tõste- ja langetussüsteemide, istmete reguleerimissüsteemide jms asukoha ja liikumise juhtimiseks.
Nutikas kodu:Nutika kodu valdkonnas saab 20 mm hübriid-samm-mootoreid kasutada kardinate avamise ja sulgemise, koduste turvasüsteemide kaamerate pöörlemise jms juhtimiseks.
Need on vaid mõned 20 mm hübriid-sammmootorite levinumad rakendusvaldkonnad. Tegelikult on astmemootoritel lai valik rakendusi erinevates tööstusharudes ja valdkondades. Konkreetsed kasutusstsenaariumid sõltuvad ka nende konkreetsetest spetsifikatsioonidest, jõudlusest ja juhtimisnõuetest.
Eelis
Täpsus ja positsioneerimisvõime:Hübriidsed astmemootorid pakuvad suurt täpsust ja positsioneerimisvõimet peente astmeliste liigutuste jaoks, sageli madalate astmenurkadega, näiteks 1,8 kraadi või 0,9 kraadi, mille tulemuseks on täpsem positsioonijuhtimine.
Suur pöördemoment ja suur kiirus:Hübriidsed samm-mootorid on konstruktsiooniliselt loodud pakkuma suurt pöördemomenti ja õige ajami ja kontrolleriga suurt kiirust. See muudab need sobivaks rakenduste jaoks, mis nõuavad nii suurt pöördemomenti kui ka suurt liikumiskiirust.
Juhitavus ja programmeeritavus:Hübriidsed samm-mootorid on avatud ahelaga juhtimissüsteem, millel on hea juhitavus. Kontroller saab neid igal liikumissammul täpselt juhtida, mille tulemuseks on hästi programmeeritavad ja juhitavad liikumisjärjestused.
Lihtne juhtimine ja juhtimine:Hübriidsetel samm-mootoritel on teist tüüpi mootoritega võrreldes suhteliselt lihtne ajami- ja juhtimisahel. Need ei vaja positsioonitagasiside seadmete (nt enkoodrite) kasutamist ning neid saab otse juhtida sobivate draiverite ja kontrollerite abil. See lihtsustab süsteemi projekteerimist ja paigaldamist ning vähendab kulusid.
Kõrge töökindlus ja stabiilsus:Hübriidsed samm-mootorid pakuvad oma lihtsa konstruktsiooni, väikese arvu liikuvate osade ja harjadeta disaini tõttu suurt töökindlust ja stabiilsust. Need ei vaja regulaarset hooldust, neil on pikk kasutusiga ja need tagavad nõuetekohase kasutamise ja käitamise korral stabiilse jõudluse.
Energiatõhus ja madala müratasemega:Hübriidsed samm-mootorid on energiasäästlikud, pakkudes suhteliselt väikese võimsuse juures suurt väljundpöördemomenti. Lisaks töötavad nad tavaliselt madalama müratasemega, mis annab neile eelise müratundlikes rakendustes.
Mootori valiku nõuded:
►Liikumis-/paigaldussuund
►Koormusnõuded
►Insuldi nõuded
►Otstöötlemise nõuded
►Täpsusnõuded
►Kodeerija tagasiside nõuded
►Käsitsi reguleerimise nõuded
►Keskkonnanõuded
Tootmistöökoda



-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)